Why Robotics Demos Succeed but Real-World Robots Fail
Yuna Huang,Marketing Curator
Most robotics models fail in the real world because they are trained on "clean" third-person data that ignores the messy reality of execution. To move from impressive demos to reliable production, developers must shift from a model-centric approach to a data-centric framework that prioritizes ego-view (first-person) trajectories, captures the "long-tail" of edge cases, and embraces environmental partial observability.
Why Most Robotics Models Fail in the Real World: A Data-Centric Perspective
Why Robotics Models Perform Well in Demos but Fail in Production
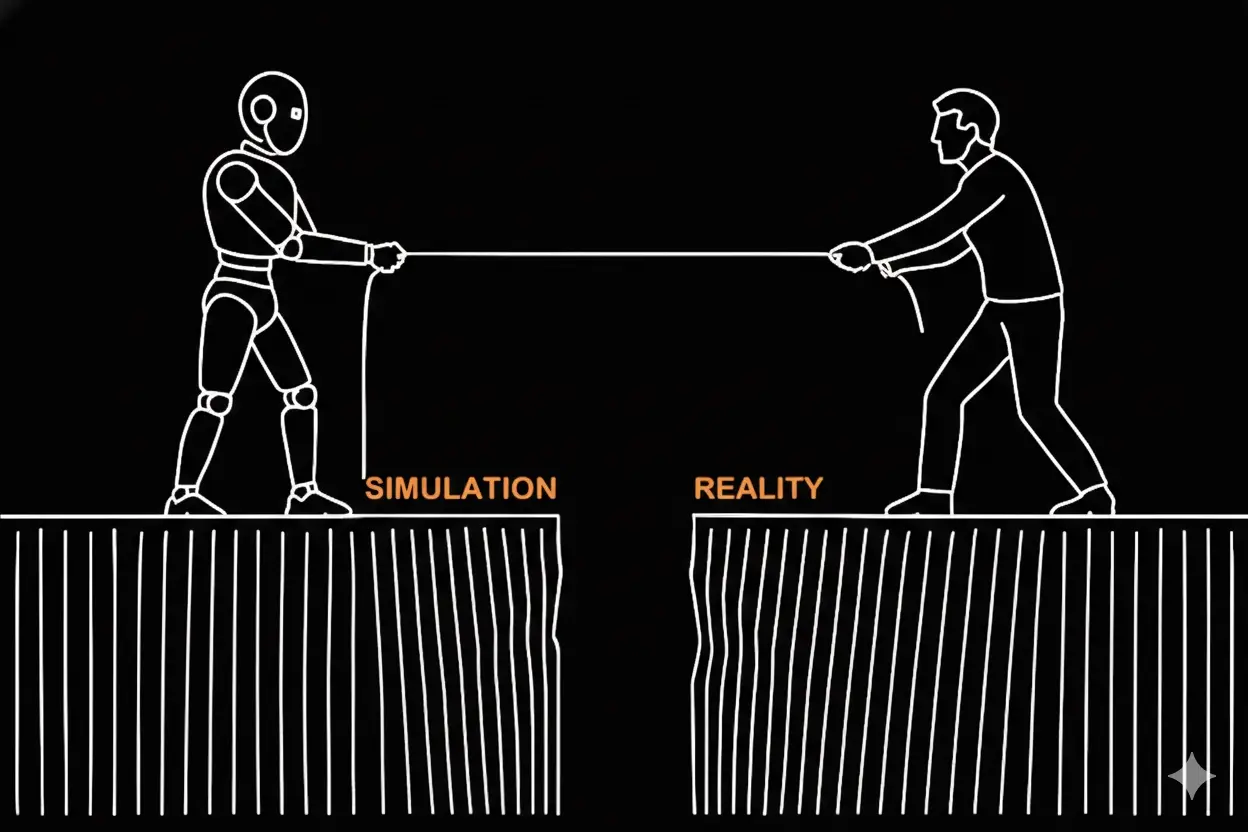
We’ve all seen the viral videos: a robot perfectly folding a shirt or picking up a cup in a sleek, well-lit lab. However, when those same models are deployed in a real home or warehouse, they often freeze or fail.
This is known as the "Simulation-to-Reality" (Sim2Real) gap, but it goes deeper than just physics. In a demo, variables are controlled. In production, the "messiness" of the real world introduces infinite variability. Most models fail not because they don't understand the goal, but because they cannot handle the noise of real-world execution.
Why Most Robotics Models Fail in the Real World: A Data-Centric Perspective
Common Data Blind Spots in Robotics Training
The root cause of production failure usually lies in the training data. If the data is sanitized, the model becomes brittle. There are three primary "blind spots" that cripple embodied AI:
Scene Diversity
Why Most Robotics Models Fail in the Real World: A Data-Centric Perspective
Many datasets are collected in a handful of "standard" rooms. In reality, every household has unique furniture layouts, varying floor textures, and shifting lighting. Without high scene diversity, models cannot generalize to a new environment they haven't seen before.
Edge Cases
Edge Case
What happens when a cat walks in front of the robot? Or when a glass table creates a confusing reflection? Traditional datasets often filter out these "bad" frames, but for a robot in production, these aren't "bad data", they are reality.
Long-Tail Interactions
The "long tail" refers to the thousands of rare but critical events that occur in the real world, dropping an object, an unexpected occlusion, or a slippery surface. If a model only learns the "happy path" (90% of successful attempts), it has no recovery strategy for the 10% of inevitable errors.
Why More Data ≠ Better Data
The industry often falls into the trap of thinking that more hours of video will solve the problem. However, volume is not a substitute for perspective.
Most existing datasets are "third-person"—captured by stationary cameras. This creates a fundamental disconnect. A robot does not experience the world from a bird's-eye view; it experiences it through a moving, shaky, often-occluded first-person lens. Adding millions of hours of third-person data only reinforces a perspective the robot will never actually have during execution.
A Data-Centric Framework for Robotics Evaluation
To build reliable agents, we need to evaluate data based on its utility for execution, not just its visual quality. A robust framework includes:
Temporal Alignment: Ensuring the robot’s perception and its physical motor commands are synchronized to the millisecond.
Ego-View Priority: Training on data that mimics the robot’s actual sensor suite (occlusions, motion blur, and all).
Continuous Feedback Loops: Instead of one-off datasets, using a system where model failures actively dictate what kind of data is collected next.
Bridge the Gap from Lab to Life
At Abaka AI, we specialize in solving the "execution gap." Our recent research into Ego-View Embodied Data for Household Environments demonstrates how first-person data collection can capture the fine-grained micro-movements and long-horizon tasks that third-person datasets miss.
Moving from a successful pilot to a production-ready robotic system requires more than just code—it requires a foundation of high-fidelity, real-world data.
Abaka AI provides the end-to-end data infrastructure you need:
Custom Data Collection: High-quality ego-view trajectories in diverse, real-world environments.
Precision Annotation: Fine-grained action descriptions that capture the "how" of movement.
Model Evaluation: Identifying your model's blind spots before they cause failures in the field.
Unlike a model-centric approach that focuses on tweaking neural network architectures, a data-centric approach prioritizes the quality, diversity, and perspective of the training data. It assumes that real-world failures are caused by data gaps (like missing edge cases) rather than insufficient model complexity.
Why does "Third-Person" data lead to execution failure?
Third-person data is captured by stationary cameras and lacks the robot’s Ego-View (first-person) perspective. In the real world, a robot's view shifts as it moves and is often blocked by its own limbs. Training only on "God's-eye" views prevents the robot from learning the correct hand-eye coordination needed for tasks.
How do we solve the "Long-Tail" problem in robotics?
The "Long-Tail" refers to rare but critical edge cases (e.g., reflections on glass or a pet crossing the path). This is solved through active learning loops: using real-world execution failures to identify specific "blind spots," then targetedly collecting data for those rare scenarios rather than just adding more "perfect" data.
Why is "More Data" not always "Better Data"?
Data utility depends on how well it mimics the deployment environment. Thousands of hours of clean, static video are less valuable than a smaller set of "messy" first-person trajectories that include motion blur, occlusions, and variable lighting—the actual conditions a robot faces.
How does "Partial Observability" affect performance?
In labs, everything is usually visible. In production, the world is partially observable—objects get hidden or blurred. If a model is only trained on "perfect" data, it will freeze when faced with uncertainty. Robust datasets must include these "noisy" variables so the robot learns to handle incomplete information.
What's your data bottleneck this quarter?
Missing data
We collect it.
Messy data
We label it.
No time
We have itOff-The-Shelf.
Pick the closest fit, we'll take the call from there.